Project Overview
 The RoboEarth project exploits a new approach towards endowing robots with advanced perception and action capabilities, thus enabling robots to carry out useful tasks autonomously in circumstances that were not planned for explicitly at design time. The core of the innovation proposed involves the development of a World Wide Web-style database: RoboEarth. RoboEarth allows robots to share any reusable knowledge independent from their hardware and configuration. When a robot starts performing a task, it is able to download available high-level knowledge on both task and environment. Next, it can use and translate this knowledge to its hardware specifications and its configuration and improve it by learning during the execution of the task. Finally, the robot may upload its knowledge to RoboEarth again, sharing it to the benefit of all other participating robots.
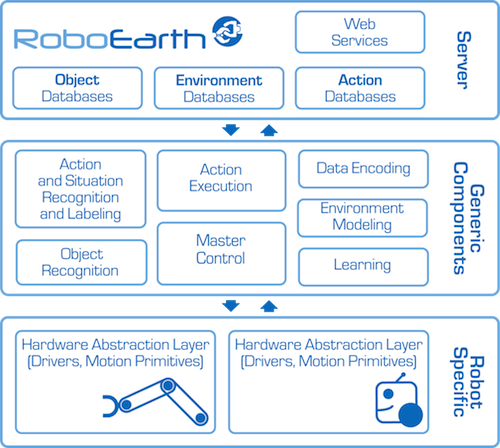
The RoboEarth project exploits a new approach towards endowing robots with advanced perception and action capabilities, thus enabling robots to carry out useful tasks autonomously in circumstances that were not planned for explicitly at design time. The core of the innovation proposed involves the development of a World Wide Web-style database: RoboEarth. RoboEarth allows robots to share any reusable knowledge independent from their hardware and configuration. When a robot starts performing a task, it is able to download available high-level knowledge on both task and environment. Next, it can use and translate this knowledge to its hardware specifications and its configuration and improve it by learning during the execution of the task. Finally, the robot may upload its knowledge to RoboEarth again, sharing it to the benefit of all other participating robots.RoboEarth is based on a three-layered architecture. The core of this architecture is a server layer which holds the RoboEarth database. It stores a global world model and provides basic reasoning services. It is accessible via common web interfaces. A second layer implements generic components. These components are part of a robot's local control software. Their main purpose is to allow a robot to interpret RoboEarth's action recipes. Additional components enhance and extend the robot's sensing, reasoning, modeling, and learning capabilities and contribute to a full proof-of-concept that closes the loop from robot to the world-wide-web database to robot. The third layer implements skills and provides a generic interface to a robot's specific, hardware-dependent functionalities via a Skill Abstraction Layer.
Videos
In January 2011 the RoboEarth team gathered for a one-week workshop. The goal of the workshop, which was successfully achieved, was to use the AMIGO robot, that was built at the Technical University of Eindhoven, to serve a drink to a patient in a hospital room environment. Therefore the robot should benefit from knowledge shared through RoboEarth.The robot itself only had certain basic skills like navigation, moving its arms or using the grippers. These so called action primitives were addressed by corresponding items of a pre-shared action description, also known as action recipe, which was downloaded from RoboEarth by the robot. Starting from the mentioned basic skills, complex actions can be composed that are far beyond the initial capabilities of the robot. The robot's execution engine was responsible for translating the semantic descriptions into physical actions.
The great outcome of this week is an indicator of what RoboEarth can do for robots. It excels at broadening their knowledge and capabilities and increasing their level of proficiency.
RoboEarth also developed a cost-effective way to create and share object models for object recognition and pose estimation. Those models have been augmented with a semantic meta-description, so that they can be referenced by action recipes and easily shared among robots that intend to manipulate the corresponding objects.
Instead of triangular meshes, the object models are stored as colored 3D point clouds.
Two different algorithms have been implemented that make use of the object models stored in the database, one for using common RGB cameras and another one for the Kinect sensor.
This video shows a Serve-A-Drink demonstration as part of the third internal RoboEarth workshop. Two robots with different hardware and in different locations use RoboEarth to share knowledge. It shows an example of a successful cloud robotics solutions: Shared knowledge bases like RoboEarth and its reasoning services can add to the development of robots by enhancing their capability to navigate, recognize objects, and perform complex manipulation tasks without being explicitly pre-programmed for these tasks beforehand.
People
Robotics and Embedded Systems
- Alexander C. Perzylo, M.Sc.
- Dr. Reinhard Lafrenz
Intelligent Autonomous Systems Group
- Dipl.-Ing. Moritz Tenorth
Partners
The multidisciplinary team includes excellent parties from all over Europe:- Technische Universiteit Eindhoven (TU/E)
- Philips Applied Technology
- Universtität Stuttgart (USTUTT)
- Eidgenössische Technische Hochschule Zürich (ETHZ)
- Universidad de Zaragoza (UNIZAR)