Robot-assisted Microscopic Manipulation for Vitreo-retinal Ophthalmologic Surgery
iRAM!S is a research project focusing on the research and development of a robotic system for assisting ophthalmic surgeons to perform complex retinal surgeries with reduced tremor and higher precision.
Overview
Eye surgeons around the world have to deal with every day scenarios which demand high-precision manipulation of surgical devices. Fragility of the human eye anatomy and surgeon’s hand tremor make the treatment of certain ophthalmic ailments nearly impossible. Retinal Vein Occlusion (RVO) is one such disease without any generally approved surgical treatment. A promising treatment concept for RVO is injecting clot-dissolving drugs like tissue Plasminogen Activator (tPA) directly into the blocked vessel. However, due to the mentioned limitations, this procedure of placing the needle and holding the tip steadily during the injection process is practically impossible for human surgeons. Reports suggest that there are 16 million patients suffering from RVO. If not treated, it causes complete blindness. Few robotic research groups have developed manipulators to address this problem. However, an operation room compatible device is still an open issue.
Purpose
In this project we are working on the design and development of a robotic device which 1) up-skills the manipulation capabilities of surgeons and 2) is compatible to conventional ophthalmic operation rooms. From the clinical point of view, our main goal is to treat patients with RVO. A robot with the ability of RVO treatment can be also used in various intraocular operations and provides new surgical abilities. Reaching our clinical goals will open the doors to our entrepreneurial objective which is entering the ophthalmic device market.
Methods
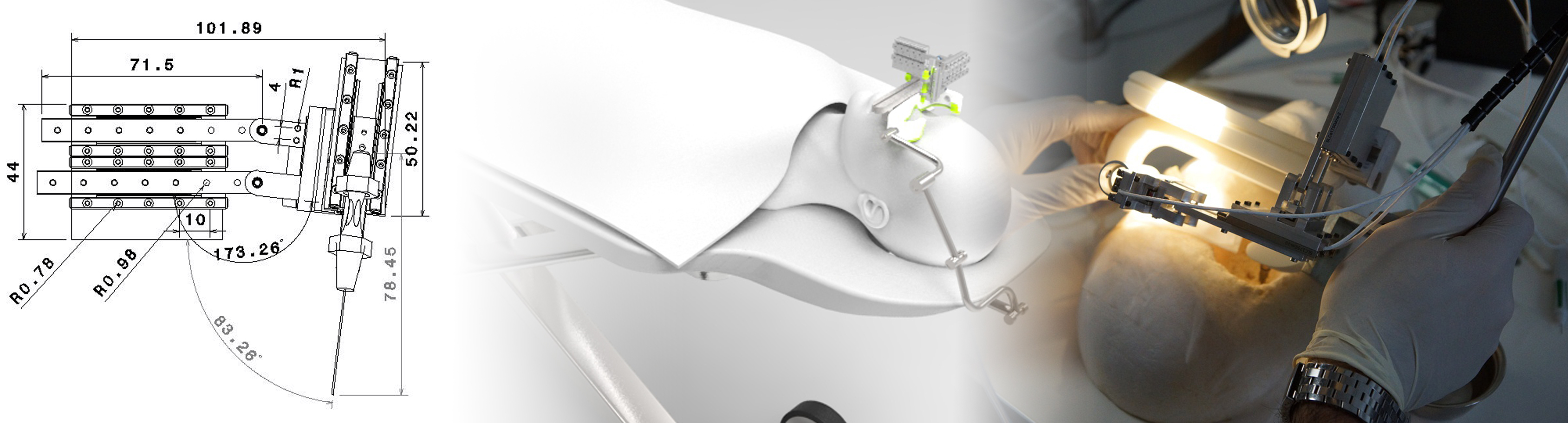
Based on 23G pars-plana vitrectomy equipment, an additional mounting device was designed to dock to the patient’s eye and provides stability during manipulation. The robot uses a novel kinematics consisting of 6 piezo motors (5 prismatic and 1 rotational). Table below illustrates the characteristics of the robot. According to the surgeons’ motion analysis data, these characteristics are sufficient for all ophthalmic procedures. The robot was designed with an adjustable RCM (remote center of motion) point which allows it to be configured for manipulating the tool pivoting around the insertion point.
| Tool tip Precision | Working Volume | Tool Rotation | Linear Velocity | Angular Velocity | Robot Weight | Robot Size |
|---|---|---|---|---|---|---|
| 5μm | 50x50x50mm | 360 deg | 40 mm/s | 1.11 rad/s | 306 gm | 185x44x226mm |
- Compact device with small clinical footprints which can be mounted directly on patients head
- Fully embedded controller which makes our complete setup compact and portable
- Middle-ware based embedded architecture which enables easy integration of the system to operation rooms and also to additional devices (Such as ophthalmic microscope).
Demonstrations
Collaborations
This project is the flagship project of the Graduate School of Information Science in Health (GSISH) at the Technische Universitaet Muenchen. It is supervised by Prof. Dr.-Ing. Alois Knoll Director of Robotics and Embedded System Group, and Prof. Dr. med. Dr. (Lond.) Chris P. Lohmann Director of Ophthalmology Department, Klinikum Rechts der Isar, Munich. Currently two doctoral candidates, one postdoc and two eye surgeons are involved in the project. Strong collaborations with Johns Hopkins University, University of Tokyo and TU Eindhoven allow us to evaluate our achievements in different workspaces.
Partners
- Robotics and Embedded Systems
- Graduate School of Information Science in Health
- Klinikum rechts der Isar der Technischen Universität München
People
- Dr.-Ing. M. Ali Nasseri
- Dr.-Ing. Martin Eder
- Dr. Suraj Nair
- M.Eng. Mingchuan Zhou
- Prof Dr.-Ing. habil. Alois Knoll
Publications
| [1] | Mingchuan Zhou, Kai Huang, Abouzar Eslami, Hessam Roodaki, Daniel Zapp, Mathias Maier, Chris P. Lohmann, Alois Knoll, and M. Ali Nasseri. Precision needle tip localization using optical coherence tomography images for subretinal injection, to be appear. In 2018 IEEE International Conference on Robotics and Automation(ICRA), May 2018. [ .bib ] |
| [2] | Mingchuan Zhou, Kai Huang, Abouzar Eslami, Daniel Zapp, Haotian Lin, Mathias Maier, Chris P. Lohmann, Alois Knoll, and M. Ali Nasseri. Beveled needle position and pose estimation based on optical coherence tomography in ophthalmic microsurgery. In 2017 IEEE International Conference on Robotics and Biomimetics, December 2017. [ .bib ] |
| [3] | Mingchuan Zhou, Hessam Roodaki, Abouzar Eslami, Guang Chen, Kai Huang, Mathias Maier, Chris P. Lohmann, Alois Knoll, and M. Ali Nasseri. Needle segmentation in volumetric optical coherence tomography images for ophthalmic microsurgery. In Applied Sciences, July 2017. [ .bib | .pdf ] |
| [4] | Kai Huang, Mingchuan Zhou, Carolina Lajblich, Chris P. Lohmann, Alois Knoll, Yehua Ling, Haotian Lin, and M. Ali Nasseri. A flexible head fixation for ophthalmic microsurgery. In 2017 Chinese Automation Congress (CAC), 2017. [ .bib ] |
| [5] | Alexander Barthel, Diego Trematerra, M. Ali Nasseri, Daniel Zapp, Chris P. Lohmann, Alois Knoll, and Mathias Maier. Haptic interface for robot-assisted ophthalmic surgery. In Proceedings of the 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC'15), August 2015. [ .bib ] |
| [6] | M.A. Nasseri, P. Gschirr, D. Eberts, M. Eder, S. Nair, K. Kobuch, M. Maier, D. Zapp, C.P. Lohmann, and A. Knoll. Virtual fixture control of a hybrid parallel-serial robot for assisting ophthalmic surgery: an experimental study. In Proceeding of: 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (Biorob), August 2014. [ .bib | .pdf ] |
| [7] | Morteza Hashemi Farzaneh, Suraj Nair, M.A Nasseri, and Alois Knoll. Reducing communication-related complexity in heterogeneous networked medical systems considering non-functional requirements. In 16th International Conference on Advanced Communication Technology (ICACT), pages 547-552, Feb 2014. [ DOI | .bib | .pdf ] |
| [8] | Amin Mahdizadeh, M. Ali Nasseri, and Alois Knoll. Transparency optimized interaction in telesurgery devices via time-delayed communications. In Proceeding of The IEEE Haptics Symposium. IEEE, 2014. [ .bib | .pdf ] |
| [9] | Alois Knoll, Mohammad Ali Nasseri, and Martin Eder. Manipulator mit serieller und paralleler kinematik. Deutsche Patentanmeldung, 2014. DE102012013511A1. [ .bib | .pdf ] |
| [10] | Alois Knoll, Mohammad Ali Nasseri, and Martin Eder. Manipulator with serial and parallel kinematics. Internationale Patentanmeldung, 2014. WO2017/00583A1. [ .bib | .pdf ] |
| [11] | Nasseri M. Ali, Maier M, Zapp D, Nair S, Eder M, Kobuch K, Chris P. Lohmann, and Alois Knoll. Robot for assisting ophthalmic surgery. In Proceedings of the International Society for Medical Innovation and Technology(iSMIT). iSMIT, September 2013. [ .bib ] |
| [12] | S. Nair, M. Ali. Nasseri, M. Eder, C. P. Lohmann, and A. Knoll. Embedded middleware and hard real-time based architecture for robot assisted ophthalmic surgery. In The Hamlyn Symposium on Medical Robotics, 2013. [ .bib ] |
| [13] | M. Maier, M. Ali Nasseri, D. Zapp, Martin Eder, K. Kobuch, C. P. Lohmann, and Alois Knoll. Robot-assisted vitreoretinal surgery. In The Association for Research in Vision and Ophthalmology Annual Meeting (ARVO 2013), Poster session, Seattle, Washington, US, 2013. [ .bib | .pdf ] |
| [14] | M.A. Nasseri, M. Eder, S. Nair, E.C. Dean, M. Maier, D. Zapp, C.P. Lohmann, and A. Knoll. The introduction of a new robot for assistance in ophthalmic surgery. In Engineering in Medicine and Biology Society (EMBC), 2013 35th Annual International Conference of the IEEE, pages 5682-5685, 2013. [ DOI | .bib | .pdf ] |
| [15] | M.A. Nasseri, M. Eder, D. Eberts, S. Nair, M. Maier, D. Zapp, C.P. Lohmann, and A. Knoll. Kinematics and dynamics analysis of a hybrid parallel-serial micromanipulator designed for biomedical applications. In Advanced Intelligent Mechatronics (AIM), 2013 IEEE/ASME International Conference on, pages 293-299, 2013. [ DOI | .bib | .pdf ] |
| [16] | Mathias Maier, M Ali Nasseri, Daniel Zapp, Martin Eder, Karin Kobuch, Chris Lohmann, and Alois Knoll. Robot-assisted vitreoretinal surgery. Investigative Ophthalmology & Visual Science, 54(15):3318-3318, 2013. [ .bib ] |
| [17] | Jing Wu, M.A. Nasseri, M. Eder, M. Azqueta Gavaldon, C.P. Lohmann, and Alois Knoll. The 3d eyeball fea model with needle rotation. APCBEE Procedia, 7:4 - 10, 2013. The 3rd International Conference on Biomedical Engineering and Technology - ICBET 2013. [ DOI | .bib | .pdf ] |
| [18] | M. Pak and M. Ali Nasseri. Load-velocity characteristics of a stick-slip piezo actuator. In Proceedings der Actuator 2012. International Conference on New Actuators (ACTUATOR-12). Actuator'12, June 2012. [ .bib ] |
| [19] | M. Ali Nasseri, Emmanuel Dean-Leon, Suraj Nair, Martin Eder, Mathias Maier, C. P. Lohmann, and Alois Knoll. Clinical motion tracking and motion analysis during ophthalmic surgery using electromagnetic tracking system. In Proceedings of the 5th International Conference on BioMedical Engineering and Informatics (BMEI 2012), pages 1006-1010. IEEE Press, 2012. [ .bib | .pdf ] |
| [20] | M.A. Nasseri and M. Asadpour. Control of flocking behavior using informed agents: An experimental study. In Swarm Intelligence (SIS), 2011 IEEE Symposium on, pages 1-6, 2011. [ DOI | .bib | .pdf ] |
| [21] | F. Arvin, K. Samsudin, and M.A. Nasseri. Design of a differential-drive wheeled robot controller with pulse-width modulation. In Innovative Technologies in Intelligent Systems and Industrial Applications, 2009. CITISIA 2009, pages 143-147, 2009. [ DOI | .bib | .pdf ] |
 |
 |
 |
  |